Robotic Arm Dos
One year later…
Last year was my first encounter with the robotic arm. I managed to understand what it is and how to set it up. Sounds superficial? Indeed!.
This spring semester I decided to face the robotic arm again, with a bit more patience and a bit more courage. I felt confident that at least I can learn a bit more on the software side.
Goals:
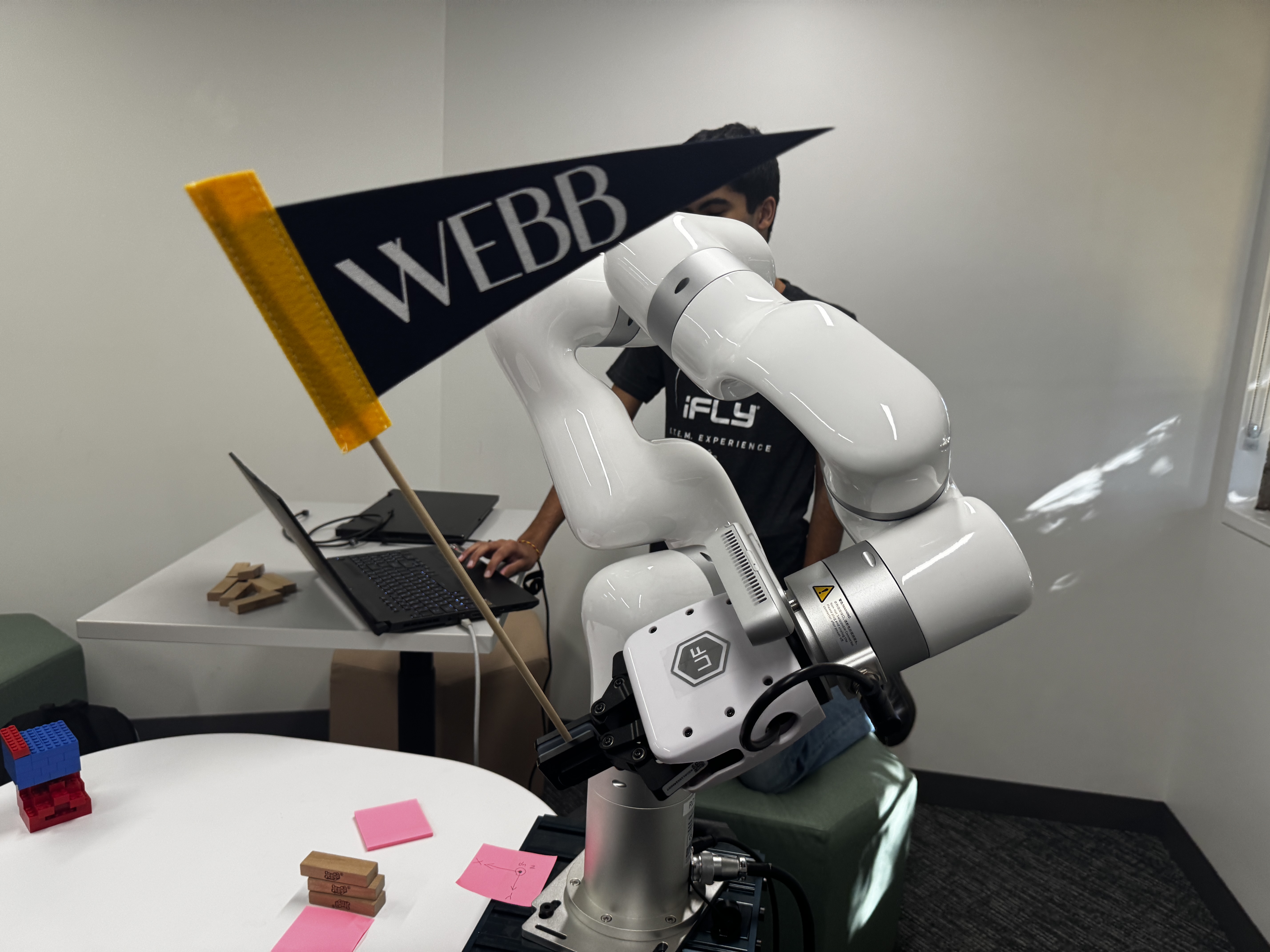
The GRAND goal was to stack jenga blocks in a closed-loop visual control rather than a scripted coordinate.
To achieve this I give myself some Sub Goals:
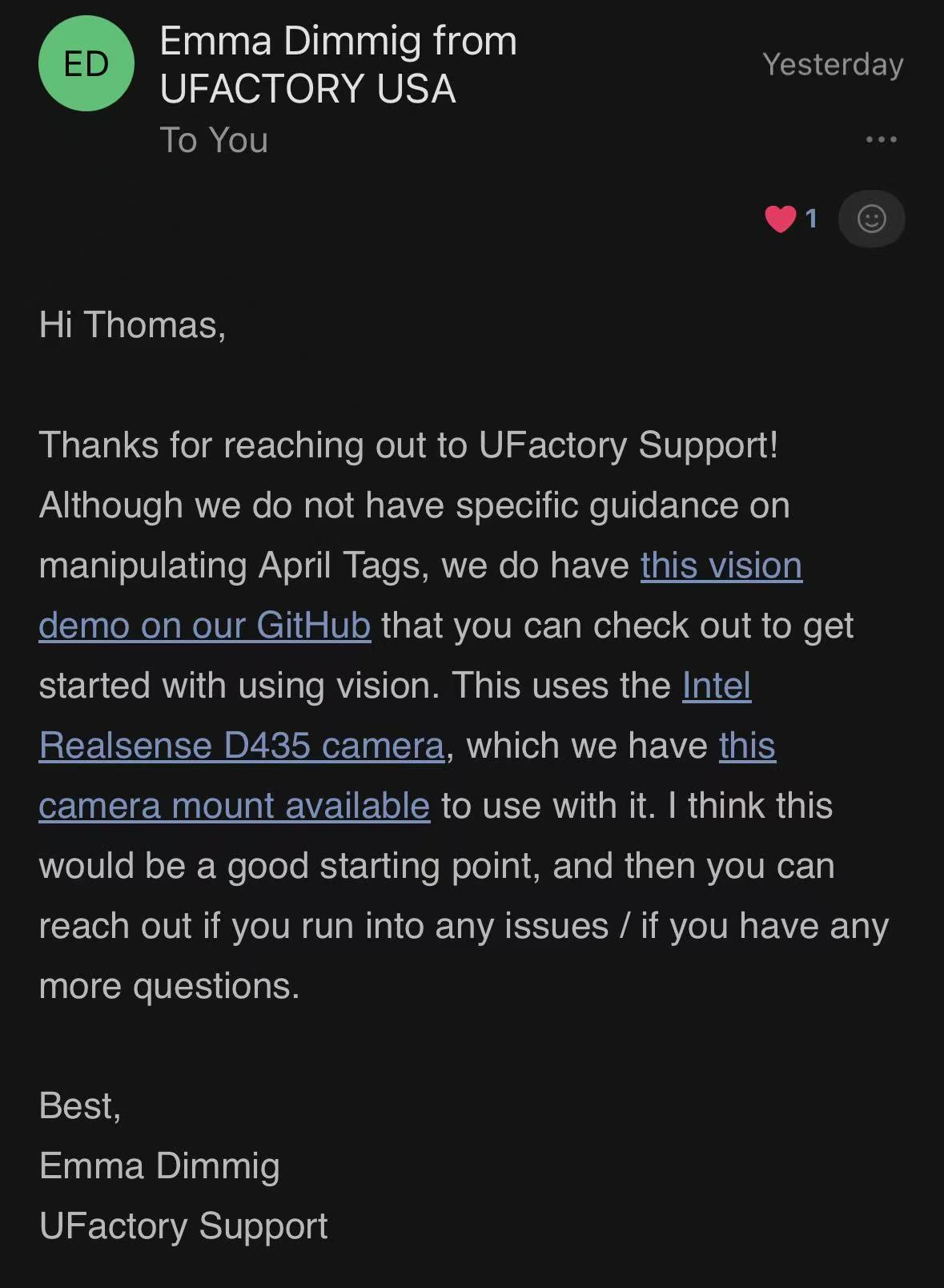
- Using the Intel RealSense D435 to build a clean data collection setup.
- Meaning that I can create a repeatable camera setup and capture images of Jenga blocks under different lighting, angles, backgrounds, and stack arrangement
- Using classical OpenCv to detect jenga blocks in the image.
- edge detection
- contour detection
- rectangle fitting
- oriental estimation
- Estimate block position and orientation in real space
- Execute reliable pick actions
- Execute reliable place actions
- Add corrections and feedbacks
Outreach:
Cold email is sometimes very hot:
Resources
- UFACTORY Documentation — Official UFACTORY docs for manuals, APIs, support articles, and release notes.
- xArm Python SDK — Official Python SDK for controlling xArm robots.
- UFACTORY Vision — UFACTORY’s vision-related repository, useful for camera integration and vision-based robotic workflows.
- GGCNN Kinova Grasping — Reference project for vision-guided robotic grasping using GG-CNN.
OpenCV resources
-
OpenCV-Python Tutorials: Image Processing in OpenCV — Main OpenCV image-processing tutorial hub.
-
Camera Calibration — Calibrate the camera and correct distortion.
-
Camera Calibration and 3D Reconstruction (calib3d) — Geometry reference for calibration and projection.
-
Image Thresholding — Segment blocks from the background.
-
Morphological Transformations — Clean up masks after thresholding.
-
Contours: Getting Started — Find object outlines in binary images.
-
Contour Features — Measure contours and get rotated rectangles.
-
Perspective-n-Point (solvePnP) — Estimate object pose from image points.
-
Template Matching — Simple baseline for locating known visual patterns.
-
Hough Line Transform — Detect long straight edges and estimate orientation.
-
LearnOpenCV: Stereo Camera Depth Estimation With OpenCV — Helpful later if you add stereo/depth.